




Project Heads-up
This project uses the Point Cloud Library (PCL). PCL is open project for 2D/3D image and point cloud processing. The PCL API documentation here , contains details of implementing many state-of-the-art algorithms using filtering , feature estimation, surface reconstruction and segmentation.
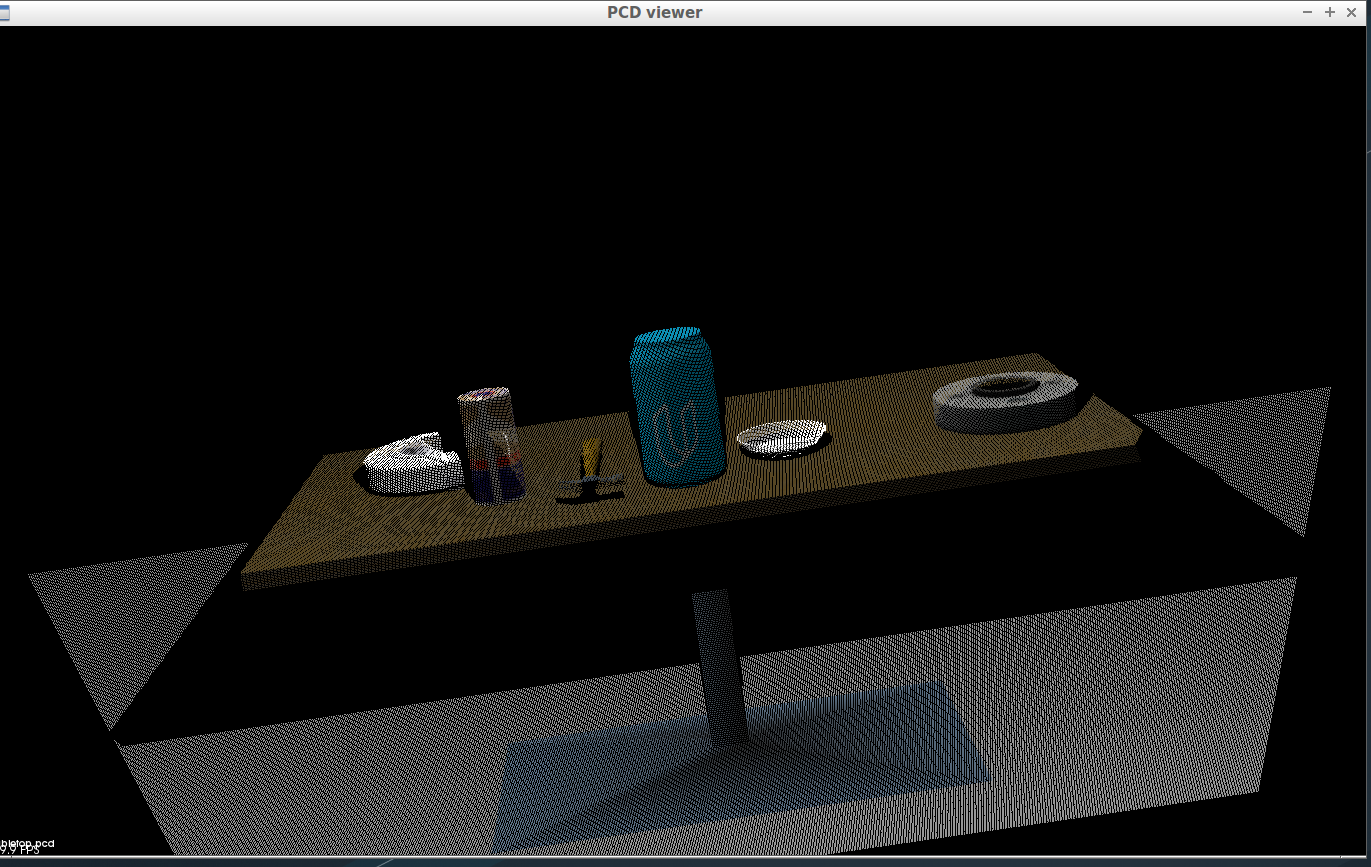
The project comprises of using the “RANdom SAmple Consensus” (RANSAC) algorithm to create point-clouds of random objects/things kept on a cluttered table.A successful implementation of the algorithm results in creating new point clouds containing the table and objects separately. The README corresponding to the project repo briefly explains the process and the filtering technique used, more can be found here - python-pcl.