




Project Heads-up
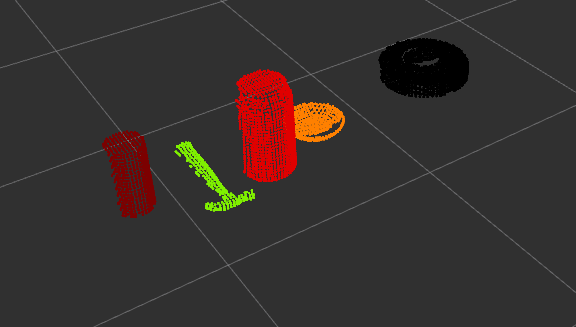
The project creates a ROS Node for image segmentation for objects kept on the cluttered table from the pcd's used in the RANSAC plane fitting project above. The setup is run and tested on the RoboND simulator Environment provided by Udacity. The segmentation has been visualized in Rviz by selecting the /pcl_objects topic.
A successful implementation of the cluster based segmentation using Voxel Grid filtering results in assigning a different colour to each custer.
The Gazebo setup for the same table top consists of a stick robot with an RBG-D camera attached to its head.