




Project Heads-up
This project gives the PR2 robot the ability to locate an object in a cluttered environment, pick it up and then move it to some other location. This is an interesting problem to solve and is a challenge at the forefront of the robotics industry today. The project uses a perception pipeline , here and here, to identify target objects from a so-called “Pick-List” in that particular order, pick up those objects and place them in corresponding drop-boxes.
Performing image segmentation and object detection are two important parts of the project forming the perception pipeline for the PR2 Robot. The control/Actuator part is handled by calling a PR2 mover function, which then calls the pr2_mover to pick and place detected objects.
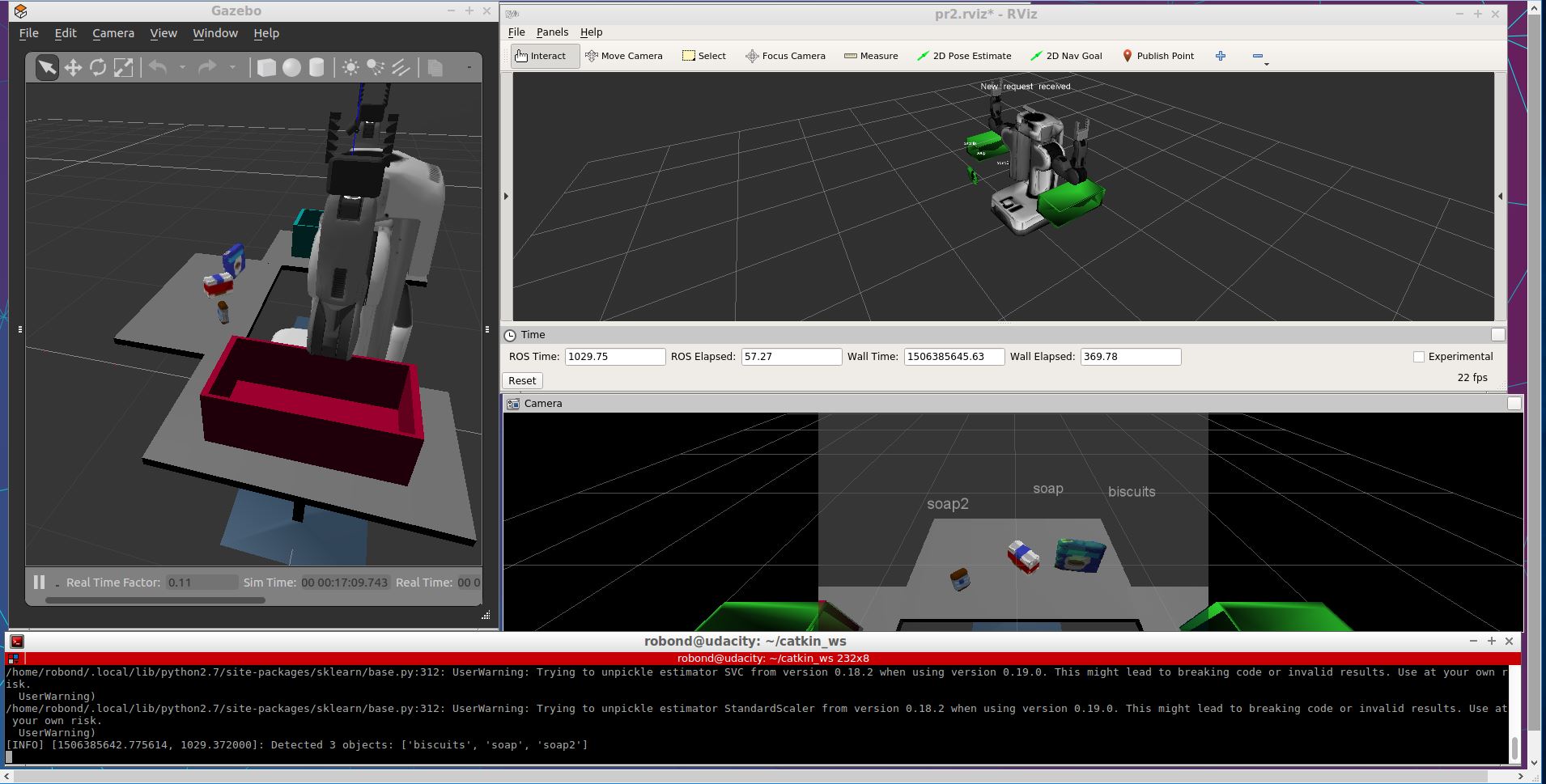
The project deals with three test world scenarios one of whose results is shown in the below image